 切换行业
切换行业

根据太阳能电池装配特点,选择出符合柔性装配系统的焊接方式。针对抓取机械手和焊接机械手的运动特点,分别设计两者运动路径方案;通过合理简化运动模型,对抓取机械手和焊接机械手分别进行运动路径分析计算,优化机械手的运动路径,以提高产品质量和生产效率。
太阳能电池是将太阳能转换成电能的装置,多块太阳能电池经焊接装配形成的大型太阳能电池板,可增加太阳能的采集总量,提高太阳能的利用率。太阳能电池柔性装配系统包含抓取机械手和焊接机械手,可根据太阳能电池的尺寸参数和特点,实现太阳能电池的自动化装配。
1. 焊接机械手的焊接方案
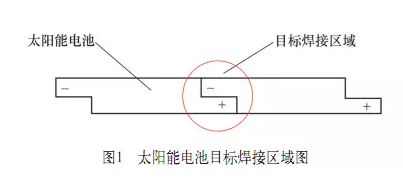
如图1所示,太阳能电池在焊接过程中,两块相邻的太阳能电池电极需搭接在一起,即一块电池的正极与另一块电池的负极相连接,焊接接头区域被完整的嵌在两块电池中间,目标焊接区域加热非常不便,不宜采用熔化焊方式。若选用压力焊接,太阳能电池电极易在高温高压下发生变形,对太阳能电池的使用性能产生不良影响。
因此,太阳能电池的焊接选用钎焊焊接方式。
2. 抓取机械手的运动路径研究
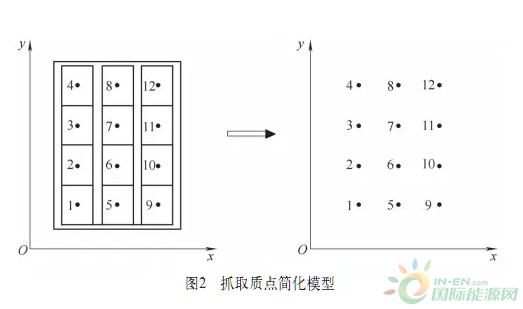
抓取机械手主要起到抓取、排列太阳能电池的作用,是将太阳能电池按照预定的设计要求排列起来;机械手共抓取12块太阳能电池,排列成4行3列。
基于全局坐标系,在抓取机械手工作时,把太阳能电池初始位置设为坐标原点;太阳能电池形状是规则的物体,则在xoy平面内的投影为规则矩形;在研究抓取机械手路径运动方案时可将每块太阳能电池在xoy平面内简化成质点,该质点即为太阳能电池的几何中心点,则抓取机械手的运动路径可以简化成图2所示模型。
由于太阳能电池的长度、宽度尺寸不同,故当x方向的速度vx与y方向的速度vy相同时,抓取机械手在x、y分量方向所需要的时间不同。当vx远大于vy时,抓取机械手在完成x方向的移动量之后需要在y方向运动一段距离;当vx远小于vy时,情况相反。
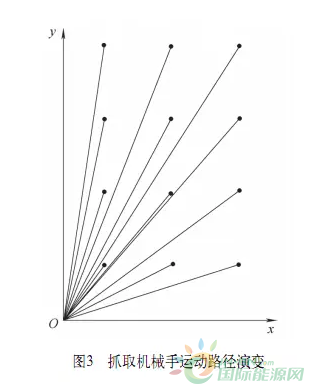
根据两点之间线段最短的原则,抓取机械手在xoy平面最理想的运动路径就是直线运动。在相同的运动时间内,x轴和y轴可以同时达到终点,这不仅保证了最短的时间,也保证了最短的路程,即两个固定点之间选择出最优的运动路径。则抓取机械手抓取12块电池的过程就演变为同一原点到12个不同终点的直线运动,如图3所示。
考虑到相邻两块太阳能电池是堆叠搭接方式,所以不能随意抓取摆放,需按照某种抓取顺序才能完成预定的要求。以第一列太阳能电池的抓取排列为例,若第一次抓取的太阳能电池摆放在编号1的位置,则第二次抓取的太阳能电池可以摆放在编号2或者编号5的位置;若第一次抓取的太阳能电池摆放在编号2的位置,则编号1的位置不易放置太阳能电池块;若第一次抓取的太阳能电池摆放在3或者4的位置,均会出现相邻的太阳能电池抓取放置困难等问题。同理,对于第2列和第3列太阳能电池的排列抓取也会出现以上排列问题。
基于以上分析易知,抓取机械手在抓取时优先沿着x轴正方向或y轴正方向依次抓取;即若按照x轴正方向抓取太阳能电池,则太阳能电池的最优位置摆放顺序为1、5、9、2、6、10、3、7、11、4、8、12(电池位置编号);若按照y轴正方向抓取太阳能电池,则太阳能电池的最优位置摆放顺序为1、2、3、4、5、6、7、8、9、10、11、12。综上所述,抓取机械手有多种运动路径,沿着x轴或y轴顺序依次排列摆放运动路径最优。
如图4所示的运动路径,为沿着y轴正方向依次抓取排列方式。工位01为抓取机械手的初始位置(也是复位位置),工位02是电池位置;A1过程是将抓取机械手从工位01运动到工位02,为机械手排列太阳能电池做准备运动;B1过程是抓取机械手工作过程。抓太阳能电池是一块一块抓取的,当机械手完成抓取和排列太阳能电池之后,会往返到工位02抓取下一块太阳能电池,再进行排列摆放。
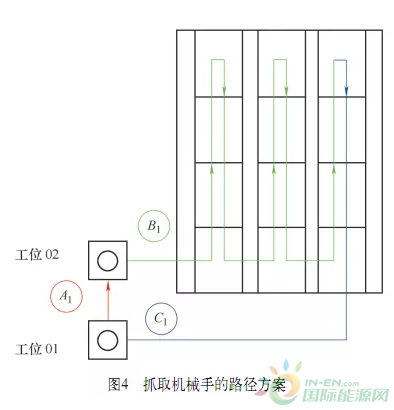
当抓取机械手完成一排电池摆放之后,将自动按照设定路径排列第二排、第三排太阳能电池,两排之间留有间隙。当抓取机械手完成其抓取和排列工作之后,沿着C1过程所示的路径返回。若需要继续工作,则返回到工位02;若不再需要工作,则返回工位01复位,以方便下一次的工作。
3. 焊接机械手的运动路径研究
焊接机械手主要是将相邻的两块太阳能电池焊接在一起,完成焊接工艺。太阳能电池排列成4行3列,需要焊接9次才能完成全部焊接工艺。将焊接位置简化成9个质点,再将9个质点串联起来,即为焊接机械手在焊接过程中的运动路径,如图5所示。
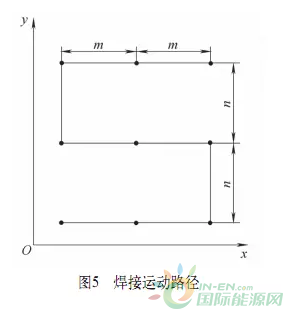
根据机械手在焊接过程中走的“S”型路线,可以计算出其在完成9次焊接时所需要走的总路程S1,易得:
S1=6m+2n
已知太阳能电池的规格参数,设长度尺寸为a,宽度尺寸为b(a>b),两列电池之间的间隙为δ,则:
m=b+δ,n=a
机械手完成焊接过程所走的总路程S1为:
S1=2a+6b+6δ
抓取机械手和焊接机械手的路径规划完成后,在PLC系统的控制下,完成了两者的协同工作,实现了太阳能电池的柔性装配功能。
4.结语
太阳能电池柔性装配系统具有结构简单、运动准确、反应灵敏和控制精度高等特点,对系统机械手运动路径的研究有助于提高太阳能电池的装配质量和生产效率,其中抓取机械手的运动路径有多种,沿x或y轴正方向运动路径最优;而对焊接机械手设计出“S型”运动路径方案,符合焊接机械手的运动要求。



 正在加载...
正在加载...


